
列车模拟驾驶器中气电式运动平台的设计
2009-05-20 来源:列车模拟驾驶器是城市轨道交通领域对列车司机进行技能培训的设备。它采用计算机仿真技术和列车控制理论,通过与影像和音响技术相结合实现对列车运行性能、驾驶环境的仿真,构建具有高度真实感的虚拟驾驶环境。列车模拟驾驶器运动平台是列车驾驶模拟训练和研究设备,是典型的人在回路实时仿真系统和虚拟现实中的应用实例。
气电式运动平台特点
目前中国国内传统地铁列车模拟驾驶器运动平台大多采用基于液压伺服缸6自由度并联机构运动平台,存在固有频率低、运行维护成本高、体积大、有污染等缺点,气电式运动平台的设计有效的解决了以上问题,具备以下特点:
(1)承载量大。平台承载量约为3吨,采用轻钢焊接工艺,框架与滑动导轨相吻合,有效地保证了整体滑动效果。
(2)结构合理。根据地铁列车的实际运行情况和车体走行部的结构特点,采用电控滑动型运动平台与空气弹簧相结合,实现高精度模拟地铁车辆加减速及车辆的振动、侧滚等运动特性。
(3)安全性高。防脱装置的设计可使运动平台在做x轴和y轴移动时避免脱落,自动回复系统在平台出现故障时可保证运动平台自动回复到初始位置。
(4)运动平滑性好。高性能的计算机处理运动系统软件能够有效地抑制干扰抖动,保证控制要求,快速实时传递,提高系统的运动平滑性。
(5)使用维护方便。运动平台整体高度不高于60cm,属于矮型运动平台,便于受训人员进出司机室受训,其动力部分主要包括伺服电动机和空气压缩机,污染小,便于安装和维护。
系统组成原理及接口
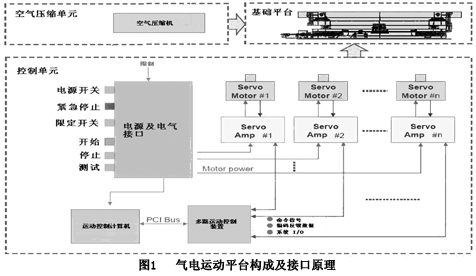
气电式运动平台系统主要由基础平台、控制单元和空气压缩单元组成。运动控制计算机依据运动参数和地铁列车应具备的姿态,将运动特性信息传递给多路运动控制装置,由多路运动控制装置发出指令,控制伺服电机和空气弹簧,实现对运动平台的控制,滑动式运动平台和空气弹簧作为执行机构,进行动作仿真。构成及接口原理如图1所示。
基础平台
基础平台是实现平台仿真运动的装置,主要包括平台框架、空气弹簧、缓冲器和防脱装置,如图2所示。高精度传感器采集步进电机工作信息,通过软件实现位置的精准定位。空气弹簧通过内部气体的控制调节使平台产生升降和侧滚等运动,并与步进电机配合,完成对基础平台的多个自由度控制,保证运动过程准确无误。防脱装置和缓冲器有效地保证了整个运动平台在运动过程中的安全。

控制单元
控制单元通过控制运动平台实现车辆运动特性,模拟车辆运动效果。主控装置通过计算机协调各部分工作,处理命令、速度、信号等信息,由伺服电动机执行运动信号,调节底部平台的位置,并接受反馈信息将再生能量返回到回路,构成停止、启动、逆行等动作。
运动平台为多变量的伺服系统,存在多个自由度,其中任何一个自由度的失控都将导致系统异常,因此控制单元是气电式运动平台中最重要的组成部分。但由于控制单元算法复杂,必须采用计算机数字控制。控制单元框图如图3所示。

运动控制计算机采用高性能的工业计算机,以满足对平台相对位置的快速解算算法要求。空气弹簧和运动机构各个自由度与运动控制计算机之间通过高性能的控制器,实现高精度控制。本控制系统采用MMC-BDPV41PNV高性能4轴步进电机控制板,它是一种基于PCI总线的高速控制板,与驱动器及步进电机一起构成了高精度位置伺服系统和调速系统。
空气压缩单元
空气压缩单元中的空气压缩装置对模拟车辆空气弹簧效果起辅助作用,可根据现场的实际情况来控制空气弹簧的起伏状态。
动感仿真
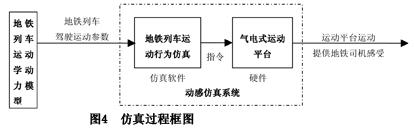
地铁列车运动过程动特性主要表现为钢轨接头处的颠簸、曲线运行中的横荡以及加速和制动时的前后冲动,而侧倾、俯仰和摇头等姿态的变化幅度很小, 特别是摇头姿态的变化在司机室中基本觉察不到。因此针对地铁车辆的运动特性,在满足承载能力、工作空间、运动加速度等各项运动指标的要求下,对地铁车辆的各种运动信息进行仿真,能够获得很好的运动平滑性。其动感仿真过程如图 4 所示。
(1)推进性能。根据空气动力学、车体重量及其它各要素进行牵引力计算,依据牵引力要求启动主电源转换器/牵引电动机实现加速度计算,以获得最佳推进性能。
(2)制动性能。系统按照车体重量及其它各要素进行制动力计算,根据控制命令进行压缩空气、机器制动和主控制器再生制动力计算,依据速度、再生制动、轨道摩擦力、刹车装置、材质制动力、轨道位置特性、坡度和弯度等要素计算出正确的制动控制压力和停车制动压力。
(3)动感控制。运动平台的动特性根据正常运行的轨道数据、螺旋弹簧的材料特性及车辆的x、y、z及轴间的回转,并考虑车辆牵引与螺旋弹簧动特性计算得出结果,用于动感控制。
(4)振动控制。通过区间轨道数据库数据分析体现列车运行中的轨道特性和列车振动特性,以运动平台基础四角上安装的空气弹簧并配合音响系统,体现列车行驶过程的振动效果。
结论
目前,气电式运动平台已在韩国首尔地铁和我国沈阳地铁等国内外模拟驾驶器中得到应用。气电式运动平台系统采用合理的执行机构和运动控制器,通过高性能计算机配合控制软件来实现动感特性的计算和控制,保证系统的运行精度,实现了对地铁列车运行的高逼真度的实时仿真,保证了最佳培训效果。 ■
(作者:沈阳铁路信号工厂开发部)











 京公网安备 11010602004570号
京公网安备 11010602004570号