
三维激光扫描技术在水利工程中的应用研究
2015-12-01 来源:世界轨道交通资讯网 作者:方毅 姜斌 吴晓梅 张阳明
本文摘要:本文将三维激光扫描技术应用于水利工程中,讨论了其工作流程,分别从工程量计算、沉降监测以及点云与BIM模型对比这几方面进行了具体的应用研究,取得了较好的结果。
三维激光扫描技术在水利工程中的应用研究
方毅 姜斌 吴晓梅 张阳明
(上海勘测设计研究院有限公司,上海市逸仙路388号,200434)
摘要:三维激光扫描技术是一项新的技术,其应用领域已越来越广泛。本文将三维激光扫描技术应用于水利工程中,讨论了其工作流程,分别从工程量计算、沉降监测以及点云与BIM模型对比这几方面进行了具体的应用研究,取得了较好的结果。
关键词:三维激光;点云;数字地面模型;建筑信息模型
The Application and Research of 3D Laser Scanning Technique
to Water Conservancy Project
Fang Yi Jiang Bin Wu Xiao-mei Zhang Yang-ming
(Shanghai Investigation, Design and Research Institute CO.,LTD, No.388 Yixian.R Shanghai 200434, China )
Abstract 3D laser scanning technology is a new technology, and its application field has more and more widely. In this paper, the 3D laser scanning technology is applied to water conservancy project. Its working process are discussed, respectively from the calculation of quantities, the subsidence monitoring and points cloud compared with BIM model this several aspects has carried on the concrete application research, have achieved good results.
Key Words 3D Laser ; points cloud;DTM;BIM
1 引言
三维激光扫描技术是近年来发展起来的一门新技术,其被誉为"继GPS技术以来测绘领域的又一次技术革命"。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标。该技术作为获取空间数据的有效手段,可以快速、精确、大量的采集空间点位信息已在众多领域发挥着越来越重要的作用。目前在水利工程建设的斜坡稳定性研究、高陡边坡地质调查、水利枢纽的地形地貌的三维数据采集,输水、送电线路的选择,以及CAD设计与动画制作、虚拟现实技术的逆向建模、交通、医疗、古建筑修复和保护工程等方面的众多领域得到了广泛的应用。为了落实公司的发展规划,提升公司信息化水平,公司正力推三维协同设计的各项工作,并朝着项目的全生命周期管理方向而努力。而三维激光扫描这项技术在水利工程中的应用,能够为项目的全生命周期管理提供数据支持,因此,公司在宁波甬新闸泵站工程中对三维激光扫描技术进行了探索,通过具体的应用研究发现,合理的应用该技术,能够提高我们的工作效率,达到我们想要的效果。
2 工程介绍
甬新闸泵站工程是宁波市城市重要防洪项目。甬新河与甬江交汇处现建有甬新闸,甬新闸泵站布置于甬新河与甬江交汇处,现甬新闸的西侧。甬新闸总净宽35米,共分7孔,单孔净宽5米,而甬新河承担着江东区部分涝水外排甬江的重要任务,是江东区主要的排涝工程。甬新闸泵站的建设对提升宁波中心城区的排涝能力具有十分重要的意义,甬新闸泵站工程主要任务是防洪、排涝。规划建设排涝流量120立方米/秒,其中应急工程设计流量60立方米/秒。工程设计挡潮防洪标准为100年一遇。
3 数据获取与数据处理
三维激光扫描技术在宁波甬新闸泵站工程中的整个工作流程可分为以下步骤:控制测量,外业数据采集,点云拼接和坐标转换,点云的后期处理,点云的实际应用。
(1)控制测量
三维激光扫描仪采集到的数据是独立坐标系下的数据,为了得到甬新闸泵站工程所用坐标系下的数据,需要控制点信息。根据现场的施工条件,每次从测量控制网引出3个以上的点作为三维激光扫描的控制点。
(2)数据采集
根据现场实际情况,在合适的位置设站,并设置好标靶,对需要扫描的内容进行详尽地扫描,为了保证点云数据的顺利拼接,相连站间需要扫描3个以上的特征点。在数据采集过程中,测站和标靶设置的合适与否,将直接影响到扫描的效率和精度。
(3)点云拼接和坐标转换
由于每站扫描的数据都是以扫描仪位置为参考点的独立坐标系,各站的点云数据没有联系,因此需要对点云数据进行拼接处理,拼接是在随机软件中通过公共特征点自动进行的。要得到项目坐标系下的点云数据,就需要进行坐标转换。其方法就是利用扫描的控制点坐标,将整个点云转换成需要的坐标系统,坐标转换的误差与控制点误差、点云拼接误差等有关。
(4)点云的后期处理
由于现场的施工环境较为复杂,点云经过拼接与坐标转换后,还不能够直接进行应用,需要对点云数据进行后期处理,其工作主要就是对点云进行去噪处理与着色处理。施工现场扫描到的脚手架、机械设备等与扫描无关的信息,在处理过程中应尽量删除,以保证点云干净。着色处理就是对点云赋予合适的颜色,让点云模型更加美观。如果采集数据的时候进行了全景扫描,则可读取真实的RGB值赋给点云,这样点云所展现的颜色就是真实的颜色。如果没有进行全景扫描,则需要通过后处理软件给点云赋予自定义颜色。
(5)点云的实际应用
根据施工进度情况,在特定的工况节点上,对现场进行了若干次扫描,将扫描的点云数据主要应用于土方工程量计算、混凝土工程量计算、沉降监测以及与BIM模型对比四个方面。
4 土方工程量计算
水利工程设计中涉及到大量开挖工程量计算问题,传统的做法是在二维方式下进行的,其计算结果往往与实际相差较大,对整个工程的概预算、施工进度安排以及土石方填挖平衡设计都会产生较大的影响,已不能适应现代工程建设的要求。而采用三维方式进行计算,则能够克服上述不足。
本文对原始地面及开挖后的地形进行了三维激光扫描,并得到了较为干净的点云数据,通过Bentley GEOPAK软件建立了数字地面模型。较高密度的点云数据,对建立高精度的DTM提供了保证,但DTM中就会存在大量的数据冗余,从而对计算机资源提出了较高的要求,在现有软硬件环境下很难满足实时的浏览编辑以及计算。由于土方工程量计算的精度要求相对较低,故对点云数据进行了抽稀处理,大大简化了数据量,最终建立了DTM模型。如图1所示:
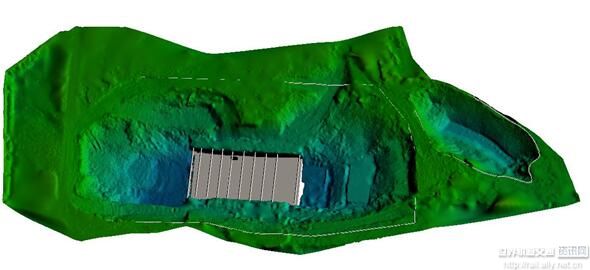
图1 基坑开挖后数字地面模型
利用建立的DTM模型,计算了图1中两个基坑的工程量,并与施工单位所报的实际工程量(同段时间内)进行了对比,具体数据如表1所示:
表1 开挖工程量计算结果(单位:万m3)

从表1中可以看出,计算的工程量与施工单位所报的实际工程量接近。由于计算所采用的边界条件与施工单位的会有所不同,因此会导致结果有误差。对于此工程而言,这种误差能够满足要求。
5 混凝土工程量计算
根据项目现场管理的需求,需要知道某些工况上混凝土的浇筑量。根据三维激光扫描的结果,将点云模型参考到BIM模型中,对BIM模型进行切割处理,然后计算出混凝土的工程量,部分计算结果如表2所示:
表2 混凝土工程量计算结果(单位:m3)

从BIM模型中可以方便的计算出任何范围内混凝土的浇筑量,但是现场施工的混凝土浇筑到了哪个范围,这个可以用点云数据来确定。如果没有BIM模型,则需要采用点云数据来建立三维模型,再来计算混凝土工程量。本文是在已有BIM模型的基础上,配合点云数据计算混凝土工程量。
6沉降监测
在整个泵站的建设过程中,周围地面往往会有不同程度的下沉,因此需要进行实时的沉降观测。本项目布设了若干沉降监测点,采用常规的水准测量每天进行了沉降观测,为了研究三维激光扫描仪在沉降监测中的应用,本文采用三维激光扫描仪对基坑边上拉森钢板上的三个沉降点进行了扫描,并与这三个点的实时水准监测成果进行了对比。限于篇幅,仅以其中一个点的数据为例进行讨论。两种测量方式的沉降量成果如表3所示:
表3:沉降量成果表(单位:mm)

从表3中可以看出,三维激光扫描成果与水准测量成果反映的沉降趋势是一致的,但二者之间存在一定的误差,这是由于两种测量方式在实施过程中,均存在着误差。两种测量方式的沉降过程曲线如图2所示:

图2 三维激光扫描与水准测量二者沉降量比较
通过此项目的实施我们发现,三维激光扫描的精度能够满足水利工程施工现场沉降监测的要求,但是效率并不一定比传统的水准测量高。两种沉降监测的测量方式各有优缺点,具体哪种效率高,取决于现场的条件。
7 点云与BIM模型对比
流道是本工程中结构较为复杂的部分,采用三维激光扫描仪对整个流道层进行了扫描,并将扫描成果与BIM模型进行了对比,本文选取了出水口部分,如图3所示:
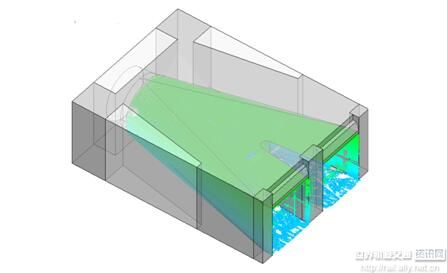
图3 点云模型与BIM模型比较
为了更清楚的反映点云的扫描精度问题,进行了剖面分析,切取了四条横剖面,如图4所示:
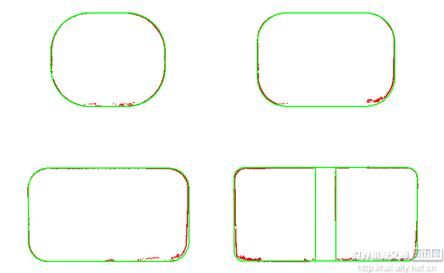
图4 点云模型与BIM模型的剖面比较
从上述4条剖面中可以发现,点云模型与BIM模型比较吻合,但是某些局部偏差稍微偏大。这是因为在现场扫描时,流道层里的扫描环境较差,同时底部有水,因此底部的数据也是不准确的。从整体看,扫描效果是较好的,能够满足对比的要求。通过点云与BIM模型的对比分析,我们可以发现施工质量的好坏,从而为施工项目管理提供一定的决策依据。
8结束语
三维激光扫描技术在宁波甬新闸泵站工程上的具体应用,取得了较好的效果,表明该项技术在水利工程中的应用是可行的。建议在地形破碎地区,保证数字地面模型的完整性和精度再跟进,在现场条件差的情况下,也能测量到建筑物的细部结构。对于三维激光扫描技术在水利工程中更深入的应用,如对水库坝体测量、对裂缝的安全监测、对隧洞断面测量、对复杂建筑物的三维建模以及对工程竣工的检查验收等方面,还需要我们进一步的深入研究与不断实践。
参考文献
[1] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005
[2] 黄承亮,向娟.三维激光扫描技术应用于建筑物建模的测量方法研究[J].城市勘测,2011, (1)
[3] 李必军,方志祥.从激光扫描数据中进行建筑物特征提取研究[J].武汉大学学报,2003, 28(1)
[4] 闫利,崔晨风.三维激光扫描技术应用于高精度断面线生成的研究[J].遥感信息,2007,(4)
[5] 李秋,秦永智,李宏英.激光三维扫描技术在矿区地表沉陷监测应用中研究[J].煤炭工程,2006,4
[6] 吴静,靳奉祥,王健.基于三维激光扫描数据的建筑物三维建模[J].测绘工程,2007,16(5)
[7] 胡开全,张燕.基于MicroStation V8实现制图效果与GIS数据要求的统一[J].城市勘测,2011(4)
[8] 赵伟,张翔宇.MicroStation V8中文版实用手册[M].北京:清华大学出版社,2002
作者简介:方毅(1983.10.7~),男,硕士,工程师,现主要从事三维协同设计技术方面的研究与应用。











 京公网安备 11010602004570号
京公网安备 11010602004570号