
浅谈日本有轨电车信号系统
2015-01-05 来源:《世界轨道交通》杂志
本文摘要:随着我国社会经济的发展,城市规模不断扩张,城市交通需求大大增加,汽车数量过度增加,道路容量的扩建远远跟不上汽车增长的速度,无法满足越来越大的人流量,造成交通堵塞、行车速度下降、空气和噪音污染严重以及巨大资源浪费,现代城市的发展面临严峻的考验。为满足城市公共交通客运量日益增长的需要,并结合城市不同区域运量区别,把注意力重新转移到地面轨道交通方式,特别是现代有轨电车,已成为国内外研究学者和政府决策部门的共识。
随着我国社会经济的发展,城市规模不断扩张,城市交通需求大大增加,汽车数量过度增加,道路容量的扩建远远跟不上汽车增长的速度,无法满足越来越大的人流量,造成交通堵塞、行车速度下降、空气和噪音污染严重以及巨大资源浪费,现代城市的发展面临严峻的考验。为满足城市公共交通客运量日益增长的需要,并结合城市不同区域运量区别,把注意力重新转移到地面轨道交通方式,特别是现代有轨电车,已成为国内外研究学者和政府决策部门的共识。在国家发改委2011年发布的《产业结构调整指导目录(2011年本)》及其2013年修订版中,有轨交通均被列为鼓励类。为促进我国有轨电车的发展,详细了解日本某有轨电车信号系统的结构、基本技术与功能等,能为我国有轨电车系统的普及优化提供借鉴和参考。
日本有轨电车概况
以日本的有轨电车为例,起始于1895年(明治28年),在最鼎盛的1932年(昭和7年)全国有65个城市开通了有轨电车线路,线路总里程达1500km。但自20世纪60年代开始,随着汽车工业的发展和公共汽车以及家用轿车的普及,大城市的公共交通逐渐被运输能力更大的地铁所占据,而中小城市的公共交通则由公共汽车所取代,城市有轨电车线路的总里程缩减到现在的250km左右。
到了20世纪80年代,随着环境保护意识的增强和技术的进步,美国、法国和英国等欧美国家重新重视城市有轨电车的发展。日本在20世纪末也开始审视城市有轨电车在城市交通运输中的作用。为了促进城市有轨电车交通的发展,日本国土交通省在2005年建立了"城市有轨电车交通系统建设费补助制度"。依据该规定,对于承担城市有轨电车交通计划项目建设的城市轨道交通企业,将分别从国家和地方政府得到相当于约1/4的建设费用补助。另外,自1997年第一批低地板轻轨车在熊本投入运营,首辆日本制造的100%低地板有轨电车于2005年在日本广岛电气铁路投入运营。该车由近畿车辆、三菱重工和东洋电器制造联合开发,为铰接式5节编组,有3台转向架,其中2台为动力转向架,采用独立旋转车轮,电机和齿轮安装在车轮外侧,地板高度为360毫米。目前,在福井、富山、冈山、高知、广岛、函馆等地共有19家有轨电车运营商,总量约1000辆。
现有系统构架
现有信号系统结构主要由以下三部分组成:车载装置、地面设备、控制中心,其结构图如图1所示。
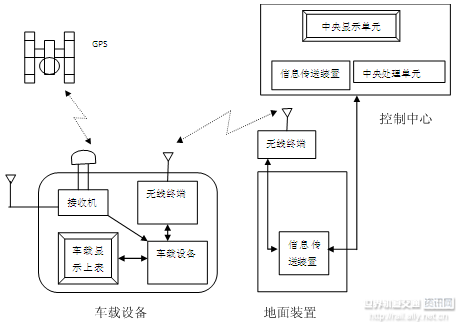
图1 现有信号结构图
(1)车载设备。车载设备主要包括信号处理单元、GPS接收及处理设备、以及与地面设备相连的无线通信设备,主要包含三种功能:利用GPS实现速度与位置测量,并通过无线终端传送至地面设备;运行与出发允许信号的检测及最大运行距离的表示;报警及提示装置。
(2)地面装置。地面装置的主要用于实现车载设备和控制中心之间的信息或命令交换。地面设备与车载(地-车)之间采用无线通信,地面设备与控制中心(地-中)之间采用有线通信。其中由车载发送给地面设备的通信内容主要包括:列车编号、出发或高速请求、停车确认、GPS异常信号等;由地面设备发送给车载的主要包括:列车编号、地面基地编号、出发或高速授权、前向最大行驶距离、停车确认等。
(3)控制中心。控制中心主要用于接收与分析车载设备发来的信息、给地面设备及列车发送信息及命令、实时显示列车位置等、把握整体线路的列车状态,抑制外部干扰等。由地面设备发送给控制中心的信息主要包括:车辆编号、地面基地编号、高速请求、停车确认、出发确认、优先请求等;由控制中心发送给地面装置(基地)的主要包括:列车编号、地面基地编号、出发或高速授权、前向最大行驶距离、停车确认等。
实验测试
通过前期实验,主要取得了以下成果:
车-地无线通信性能。通过采用自然界中不存在的Bit列-511Bit的PN模式测定,利用微功率的无线设备,测量结果表明送信距离为定向5米左右。
基于GPS的位置检测。车型:8500型,最大速度:60km/h,加速度:4.68km/h/s,减速度:6.9km/h/s,试验线长度为12公里,GPS接收机天线(通信间隔为1秒)置于车顶,采用FM作为补充,并综合利用GIS,检测结果如下:
1)对车窗、驾驶室等具体位置检查不明;
2)GPS天线在车顶位置的变化对检查结果影响不大,当接收天线于车内或离车体教近时,接收效果差,远离车体效果变好;
3)实验线路约98%区域受GPS信号覆盖,检查精度小于5米。
对车载设备、通信设备、中央处理装置、GPS接收机以及无线传送设备进行了如下检查:
(1)基于JIS-E 3004-1972-【继电联动机检查方法】的外观检查,检查结果为"良";
(2)基于JIS-E 3004-1972-【继电联动机检查方法】的配线检查,检查结果为"良";
(3)基于JIS-E 3021-1999-【铁道信号保安部品的绝缘及耐压测试方法】的绝缘及耐压检查,其检查结果为"良";
(4)基于JIS-E 3014-1999-【铁道信号保安部品的振动测试方法】的振动检查,检查结果为"良";
(5)基于JIS-E 3015-1992-【铁道信号保安部品的撞击测试方法】的撞击检查,检查结果为"良";
(6)基于JIS-E 3017-1992-【铁道信号保安部品的防水试验方法】的撞击检查,检查结果为"良";
(7)基于JIS-E 3019-1979-【铁道信号保安部品的高低温测试方法】的温度检查,检查结果为"良"。
未来系统框架及研究内容
在现有系统结构的基础上,考虑旅客、车站等因素,未来信号系统结构如图2所示。主要有以下功能:
(1)以驾驶员目测驾驶为基础,自动驾驶系统为辅助;
(2)当与前行车辆之间的距离足够大时,采用高速运行模式;
(3)建立基于车-车、车-地通信的运行管理;
(4)考虑到原则上汽车不能在轨间驾驶,拟对于处于轨间驾驶的汽车以提示或警告;
(5)当有汽车、行人等障碍物靠近时,自动报警。
未来研究方向主要有:
(1)地面设备与控制中心间的无线通信。目前,地面设备与控制中心是直接通过电缆通信,但是敷设新电缆的成本太高。即使采用无线通信,以下几个方面仍有待斟酌,例如控制中心直接与列车通信、控制中心通过地面中间设备与列车通信中频道占用与分配等。
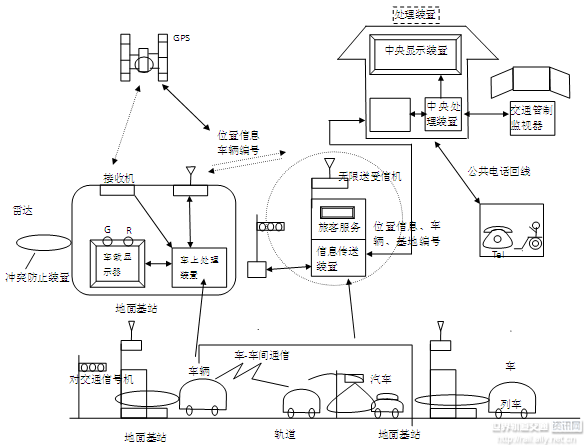
图2 未来轨道交通信号系统结构
(2)故障安全策略。目前,基于驾驶员的目测运行仍旧为主要的运行方式,但仅凭驾驶员的个人素质已不能满足高速运行的要求。特别当GPS的信号不良、通信中断等受外部干扰时,必须系统能够始终导向安全侧。同时,随着北斗卫星的成熟,基于北斗卫星的信号系统具有较好的研发前景。
(3)提高运行速度的挑战。现有系统的一般时速设计为60km/h,在进一步提高速度至80km/h或更高时,对确保系统安全将带来极大地挑战。
(4)客流影响。分析上下班高峰时段、节假日、及非高峰时段的行车安排及各站停车时间等,提高紧急事件处理能力,进一步提高便利度、安全舒适度等旅客服务质量。
(5)节能策略。研究在跨线运行等复杂路面条件下的节能策略,包括新能源电池的利用、基于节能的运行工况自动优化等。
- 上一篇:走向国际市场,中国铁路需要提升品牌
- 下一篇:PPP--城市轨道交通融资新途径
相关文章
- 氢能源 "清"交通2015-05-11
- 有轨电车:大规划与冷思考2015-02-05
- 超级电容技术助力有轨电车未来发展2014-09-25











 京公网安备 11010602004570号
京公网安备 11010602004570号